在反應(yīng)釜稱重模塊的安裝和使用過程中,如果發(fā)現(xiàn)產(chǎn)品的精度開始下降��,不準(zhǔn)確,用戶應(yīng)及時調(diào)整��。本文介紹了反應(yīng)釜稱重模塊的精度解決方案。
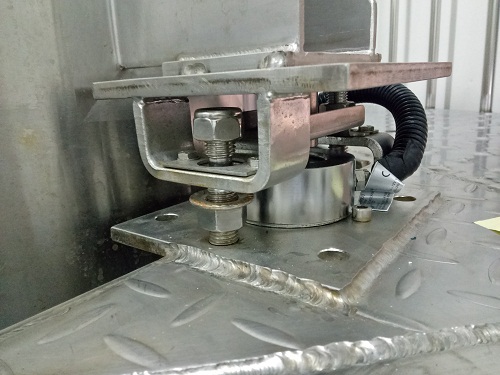
我們知道�,反應(yīng)釜稱重模塊傳感器實際上是一個傳感器裝置���,它將質(zhì)量信號轉(zhuǎn)換為可測量的電信號輸出����。按換算方法����,反應(yīng)釜稱重模塊中傳感器多達(dá)8種,電阻應(yīng)變型應(yīng)用較為廣泛。對于反應(yīng)釜稱重模塊的傳感器來說��,最重要的是其精度是否可靠。所以肯定沒有角差���。什么是角差現(xiàn)象?我們應(yīng)該如何解決這個問題和現(xiàn)象?讓我們和你討論一下���。
當(dāng)某一重物裝載在稱重平臺上時����,其差值在不同位置,只要差值大于或等于一個指標(biāo)值�����,我們認(rèn)為該天平存在角差����。如果存在角度差����,將直接影響反應(yīng)釜稱重模塊的精度。但是���,角度差對稱量精度的影響在一定程度上是隱藏的,非專業(yè)人員很難發(fā)現(xiàn)��。用戶經(jīng)常在秤體中間進(jìn)行測試�。如果中間是準(zhǔn)確的,他們會認(rèn)為整個天平是準(zhǔn)確的���,很容易忽略角度差�,這樣重量不在中間造成的誤差在當(dāng)時很難找到稱量體���。
所謂角度差的主要原因是反應(yīng)釜稱重模塊出廠時一致性不理想����。此外��,在現(xiàn)場使用中環(huán)境因素和安裝手段的限制也給多個傳感器的組合規(guī)模帶來了不平衡問題�。為了解決以上問題�����,需要選擇一個接線盒來調(diào)節(jié)傳感器的靈敏度與傳感器輸出阻抗比接近�����,從而保證整個秤體的平衡�����。



 13401503660
13401503660





 江蘇尚純自動化技術(shù)有限公司
江蘇尚純自動化技術(shù)有限公司
 地址:江蘇省常州市武進(jìn)國家高新技術(shù)產(chǎn)業(yè)開發(fā)區(qū)創(chuàng)研港2A
地址:江蘇省常州市武進(jìn)國家高新技術(shù)產(chǎn)業(yè)開發(fā)區(qū)創(chuàng)研港2A  郵箱:dumingchao@cn-sch.com
郵箱:dumingchao@cn-sch.com 手機(jī):13401503660
手機(jī):13401503660 總機(jī):0519-83863006
總機(jī):0519-83863006 技術(shù)服務(wù)部:0519-85859791
技術(shù)服務(wù)部:0519-85859791 免費咨詢熱線:4008280800
免費咨詢熱線:4008280800






 導(dǎo)航
導(dǎo)航